 压制式干扰压制式干扰即发射信号(当被雷达接收时),降低雷达处理回波信号的能力。一般而言,压制式干扰采用噪声调制,然而在某些情况下也会采用其他调制样式压制雷达的特殊工作模式。 如图所示,压制式干扰使雷达显示屏充满杂波,无法看清回波信号。图中是一个平面位置显示器(PPI)屏幕,显示屏或其他雷达输出设备出现的类似情况是由压制干扰引起的。  压制式干扰产生背景杂波,使雷达很难或无法从接收信号中提取所需信息 阻塞式干扰 如图所示,因为受干扰雷达仅在带宽内接收能量,不接收门限以外的脉冲信号,所以大部分干扰功率是无效的。干扰效能定义为目标雷达实际接收的干扰功率占干扰发射功率的比例。  图 阻塞式干扰可以在宽频段内连续辐射信号功率。这样效率比较低,因为受扰雷达只能看到雷达带宽内的干扰,只在回波信号到达时才会接收信号 瞄准式干扰  图 瞄准式干扰发射覆盖受扰雷达工作频率的窄带信号 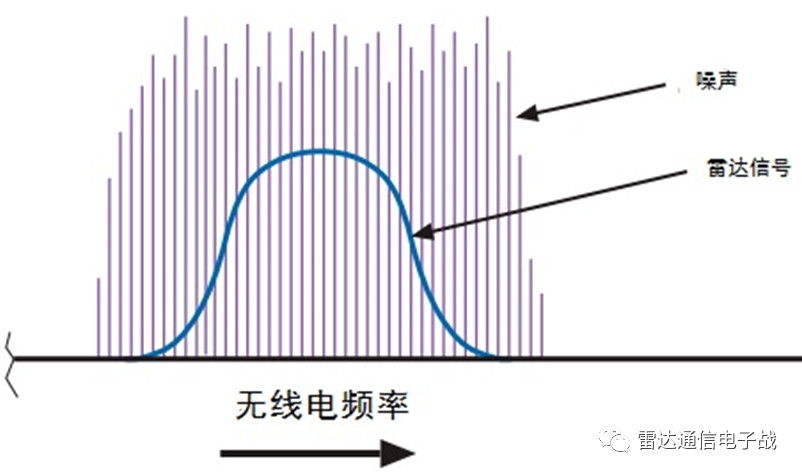 图 瞄准式干扰时,干扰带宽仅略大于受扰雷达信号的工作带宽,可以获得最佳的干扰效能。然后,由于制造工艺限制,带宽通常要宽的多,在3-20MHz之间 扫频式干扰  图 扫频式干扰仅覆盖了受扰雷达工作频段的一部分,不过扫频式干扰可以扫描整个频段  图 干扰多部不同工作频段的雷达时,需要复杂的 图 干扰多部不同工作频段的雷达时,需要复杂的射频切换,多点瞄准式干扰是最有效的干扰技术 距离波门拖引 如图所示,这是回波信号脉冲的时间特征。距离波门拖引(RGPO)是通过增大功率和拖引极小的脉冲间隔转发敌雷达脉冲,这样会增加脉冲延迟。延迟时间呈抛物线或指数形式增加。  距离波门拖引干扰通过增大功率和发射数量较多的延迟脉冲串,模拟目标远离雷达的运动将延迟回波信号脉冲到达敌雷达显示器的时间,使目标看起来好像偏离了雷达。如图所示,延迟脉冲进入雷达接收机后波门,使雷达距离跟踪电路得出的目标距离比实际大得多。  距离波门拖引干扰发射的延迟放大的回波信号脉冲,增大雷达后波门功率,使雷达向外推算目标距离,远离实际的目标 干扰脉冲的延迟增加到最大值后迅速恢复到零,然后不断重复这样的过程。这使雷达无法对目标进行距离跟踪。如图所示,这是这种过程的另一种形式(称为距离波门欺骗)。  干扰非相干雷达时,可以使用转发器自动进行距离波门欺骗。每接收到一个雷达脉冲,转发器向雷达发射一个延迟的射频脉冲 需要注意的是,如果雷达切换到回波信号脉冲前沿跟踪模式,距离跟踪器将忽略延迟的干扰脉冲,继续跟踪真实的回波信号脉冲,这时候需要采取其他干扰技术。 距离波门牵引 这是另一种方法,主要针对前沿跟踪,使用脉冲重复频率(PRF)跟踪系统预测后续每一个脉冲的到达时间,在回波信号脉冲到达之前发射一个功率更大的脉冲,如图所示。  距离波门牵引干扰发射大功率脉冲,首先要与回波脉冲一致,接着生成数量越来越多的脉冲串,模拟目标向雷达方向运动 这项技术称为距离波门牵引(RGPI)或者到达距离波门拖引。干扰信号引导时间从零开始呈抛物线或指数增长,使目标看起来正向雷达运动。雷达距离跟踪器得出的距离要比实际距离短。这种雷达跟踪器前波门电路图如图所示。  距离波门牵引干扰发射强干扰脉冲,会增大雷达前波门的功率,使雷达在真实回波信号脉冲进入之前开始距离估算 距离波门牵引需要计算未来脉冲的到达时间。雷达脉冲重复间隔固定或参差时可以计算,但雷达脉冲重复间隔随机抖动时无法计算。 速度波门拖引 如图所示,这是连续波多普勒雷达的接收功率相对频率的变化关系。考虑到地形特征引起的相对速度,所以有多个频率响应。  多普勒雷达有与地形和目标飞机相对视向速度一致的多普勒频率分量。速度波门被置于跟踪目标周围 速度波门被置于跟踪目标周围,一旦大功率信号进入速度波门,将激发频率跟踪功能,如果它远离真正的回波信号频率,雷达得到的目标速度与真实速度不同,可以破坏雷达的速度跟踪。这项技术可用来干扰脉冲多普勒雷达。 逆增益干扰 非单脉冲雷达通过回波信号脉冲幅度图形特征(相对于时间),确定目标的方位和高度。例如,圆锥扫描天线可以探测回波信号能量随时间的变化,如图所示。  图 雷达天线没有直接指向目标时,回波信号脉冲幅度较小,这时逆增益干扰会发射幅度较大的脉冲 回波信号功率呈正弦变化,天线波束距目标最近时回波信号功率最大,当天线波束距目标最远时回波信号功率最小。可以操纵天线将目标置于圆锥扫描中心,并向最大脉冲幅度方向旋转。 如果在正弦波低点发射功率增大的突发同步脉冲,雷达接收机将收到组合脉冲幅度图形,如图中虚线所示。雷达必须有一个带宽相对较窄的跟踪滤波器,才能得到正确的制导信号,否则雷达跟踪电路无法检出突发的幅度变化。 因此,雷达会认为正弦波的相位出现了颠倒。蓝色虚线叠加在图形底线,就是跟踪系统掌握的接收功率图形。将扫描中心远离目标而不是朝向目标,可以破坏雷达的角度跟踪。 这项技术可以用来干扰多种天线扫描类型的雷达,但无法干扰单脉冲跟踪雷达。 自动增益干扰 自动增益控制(AGC)干扰即发射大功率、窄带、低占空比的干扰脉冲。雷达必须靠自动增益控制来处理所需的高动态范围。未来,自动增益控制必须具备快速攻击慢衰减的特性。 因此,干扰脉冲激发雷达的自动增益控制,使前端增益下降,导致雷达无法检测天线扫描引起的回波信号脉冲幅度变化。如图所示,这是圆锥扫描雷达的工作原理。  图 自动增益控制干扰机发射大功率的窄脉冲,激发雷达接收机的自动增益控制,使前端增益下降,压缩了天线扫描的回波信号脉冲幅度图形 需要注意的是,这个图形的第二条线画的有点夸张,因为接收信号的减少量通常足以完全遮蔽正弦图形。图中用这种方式说明扫描幅度降低。 |



