  车载人工智能计算芯片是符合车规级要求的、用于运行自动驾驶 人工智能算法的芯片。 车载人工智能计算芯片涉及的技术主要包括半导体制造 及封装 技术 、芯片设计、人工智能算法设计、 车载人工智能计算芯片 应用四个层级 ,车载人工智能计算芯片的技术概览图如下图 所示。各个层级之间紧密联系,一方面,半导体制造及封装技术、芯片设计、人工智能算法设计的发展使芯片性能得到不断提升,从而促进了车载人工智能计算芯片自动驾驶方面的应用,另一方面,车载人工智能计算芯片的实际应用及应用需求的不断提升,推动着半导体制造及封装技术、芯片设计、算法设计的不断发展 。 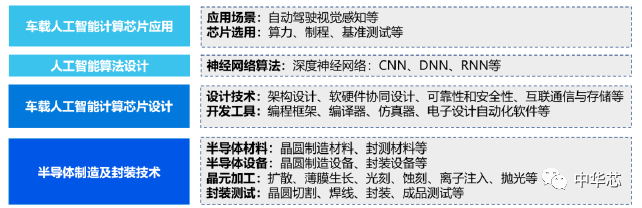 关键指标车载人工智能计算 芯片 通常以 SoC(System on Chip,片上系统)的形态呈现,其组成包括 CPU(central processing unit,中央处理器 、 AI处理器 等, 具有涉及技术面广、应用场景复杂多变等特点 。车载人工智能 计算 芯片设计过程 中存在多项指标要求 ,掌握这些指标对芯片的设计及应用过程具有良好的指导意义 。本部分重点对其关键指标展开分析: 1)算力 特定场景下对芯片计算能力评价的一个维度。算力大小代表 芯片 数字化信息处理能力的强弱。自动驾驶场景需要标量 、矢量 、矩阵 三 者结合的异构算力, 通常可以将 算力的综合评价分为两方面,即 AI算力和 CPU算力。 2)AI算力 AI处理器在 特定场景下 提供的 矢量和 矩阵 计算 能力。AI算力常 用的单位是 TOPS(Tera Operations Per Second)或 TFLOPS(Tera Floating-point operations per second),1TOPS代表 AI处理器每秒可进行一万亿次( 10^12)定点 操作, 1TFLOPS分别 代表 AI处理器每秒可进行一万亿次( 10^12)浮点 操作 3)CPU算力 CPU主要 提供 的标量算力 。CPU算力常用的单位是 DMIPS (Dhrystone Million Instructions executed Per Second),其含义为每秒钟执行基准测试程序 Dhrystone的次数除以 1757(这一数值来自于 VAX 11/780机器,此机器在名义上为 1MIPS机器,它每秒运行 Dhrystone次数为 1757次) 。 4)AI算力利用率 也称 MAC(Multiplier and Accumulation,乘累加器)利用率,指特定负载 (神经 网络 )下 AI处理器 中用于矩阵计算的 MAC阵列利用率。AI算力利用率 的计算通常采用 特定网络的 单次计算量与 AI理论 算力 (OPS)和推理时延 (s)乘积的比值 。 5)功耗 芯片 或处理器 在单位时间中所消耗的能量。常用单位为瓦( W)。实际中功耗的度量一般采用典型功耗,典型功耗是指 芯片或处理器 在 典型负载工况下(如基于特定测试数据集 ,运行特定神经网络 ,采用 特定数据精度、批量及图像分辨率的工况)获取的实际功耗。典型功耗的测试场景与实际生产环境更为接近, 具备一定的 代表性。 6)能耗比 用于度量在单位功耗下芯片或处理器 的 AI计算 能力。常用单位为 TOPS/W或 TFLOPS/W。对于车载人工智能计算芯片来说,能 耗比 至关重要,能 耗比高的芯片 或处理器 可以用更少的能量完成 AI计算。能耗比的计算通常采用 芯片 或处理器单位时间内的推理次数除以对应功耗。根据 功耗 对象选择的差异,能耗比 通常 可分为 AI处理器 能 耗比( 功耗采用 特定负载工况下获得的 AI处理器功耗 )与 SoC能耗 比( 功耗采用 特定负载工况下获得的 SoC功耗 )两类。 7)时延 芯片完成一次完整的输入、处理、输出过程的时间。常用单位为毫秒( ms)。对于自动驾驶场景,不仅需要关注运行感知 神经 网络的时延, 还应关注端到端时延。端到端时延主要包括三点:一是传感器通过芯片接口将传感器数据输入 SoC,通过 ISP( Image Signal Processor,图像处理器)等做信号处理并将处理后的数据写入等做信号处理并将处理后的数据写入DDR(Double Data Rate Synchronous Dynamic Random Access Memory,双 倍速率同步动态随机存取内存)倍速率同步动态随机存取内存)的时延;二是的时延;二是AI处理器处理器从 DDR读入 数据并进行感知,融合及定位处理的时延;三是基于感知及定位的结数据并进行感知,融合及定位处理的时延;三是基于感知及定位的结果进行路径规划及控制,并果进行路径规划及控制,并完成输出完成输出信号 发送 的时延 。 8)计算精度 芯片的 计算 结果相比预期结果的精确程度。结果相比预期结果的精确程度。芯片的芯片的计算精度越高,计算精度越高,说明计算 结果越接近真值结果越接近真值。提升计算精度通常需要增加芯片的。提升计算精度通常需要增加芯片的计算资计算资源, 相应的会带来相应的会带来成本 和功耗 的增加。实际中,计算精度增加。实际中,计算精度还受到模型、受到模型、数据集等多重因素的影响,不同的数据集数据集等多重因素的影响,不同的数据集对计算精度计算精度的要求 不同 。 9)数据精度 芯片支持的数据计算精度类型,如INT8,INT16,FP16,FP32。 10)带宽 芯片 支持 访问内存数据访问内存数据的速率的速率。该指标代表了内存总线所能提供。该指标代表了内存总线所能提供的数据传输能力。目前,带宽要求主要包括两个方面,一是片内缓存的数据传输能力。目前,带宽要求主要包括两个方面,一是片内缓存的访问 速率 ,二是片外内存的访问,二是片外内存的访问速率 。带宽会对。带宽会对AI处理器处理器的利用的利用率、端到端时延率、端到端时延、功耗、功耗等产生影响。等产生影响。 11)泛化能力 芯片采用特定数据集训练的特定模型对不同测试场景的适应能力。这种适应能力通常会选用多种模型,测试每个模型的算力时延比力。这种适应能力通常会选用多种模型,测试每个模型的算力时延比及精度,综合评价芯片的泛化能力。及精度,综合评价芯片的泛化能力。 12)最大感知能力 芯片最大支持的感知类传感器输入数芯片最大支持的感知类传感器输入数据的处理能力。通常需要按据的处理能力。通常需要按照芯片最大支持的感知类传感器数目及其性能要求,应用给定的测试照芯片最大支持的感知类传感器数目及其性能要求,应用给定的测试数据和测试模型(与传感器数目对应),完成数据处理过程,获取芯数据和测试模型(与传感器数目对应),完成数据处理过程,获取芯片输出的时延、速率、精度等参数,实现对芯片最大感知能力的评定。片输出的时延、速率、精度等参数,实现对芯片最大感知能力的评定。 13)安全性 主要包括功能安全、信息安全等安全要求。 14)可靠性 描述芯片可以正常、准确、稳定地发挥其功能和性能的能力和程度。 15)开放性 提升芯片的开放性即从开发层面开始为用户(如应用开发工程师、如应用开发工程师、中间件开发工程师、算法工程师等中间件开发工程师、算法工程师等)提供一个具有高度可扩展性、兼提供一个具有高度可扩展性、兼容性、灵活性的开发平台,降低不同框架适配迁移可能产生的不可预容性、灵活性的开发平台,降低不同框架适配迁移可能产生的不可预知成本,实现提高开发效率、缩短开发周期等要求。开放性主要体现知成本,实现提高开发效率、缩短开发周期等要求。开放性主要体现在三个方面:一是提供统一开放的编程接口,便于自动驾驶开发人员在三个方面: 一是提供统一开放的编程接口,便于自动驾驶开发人员调用,有效实现调用,有效实现SoC资源的调用及异构算力的编排; 二是提供统一开放的神经网络及算子开发接口; 三是提供不同框架下网络模型的转换、量化、压缩工具,以及算子、整网的调优工具,便于快速开发、调试及调优工作的实施。 产业链分析  车载人工智能计算芯片产业链主要分为上中下游三部分。上游主要包括半导体材料、半导体设备、IP 核(Intellectual Property core)设计、EDA(Electronic Design Automation,电子设计自动化)工具四个方面,中游主要包括芯片设计、晶圆制造、封装测试三个方面,下游主要包括车载人工智能计算芯片在自动驾驶行业的应用。产业链简图如下 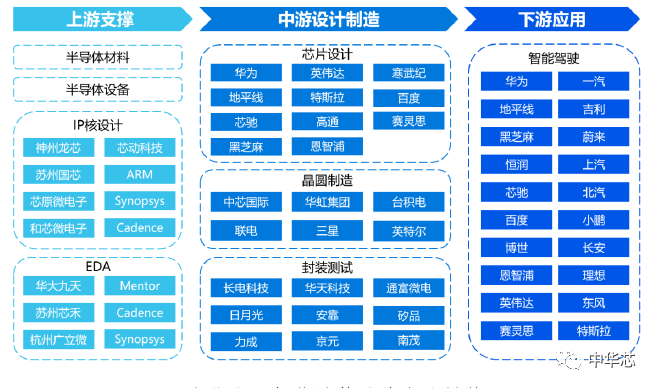 |



